In general, Railway gates are opened or closed manually by a gate keeper. The information about arrival of train for opening or closing of door is received from nearby station. But some railway crossings are totally unmanned and many railway accidents occur at these unmanned level crossings.
To avoid the human intervention at level crossings completely, we need to automate the process of railway gate control.
This project deals with an interesting manner of automating the railway gate control where the gate is automatically opened or closed by detecting the arrival or leaving of the train.
Principle of operation
The principle of operation behind the working of this project lies in the functioning of IR Sensor. A Reflective type IR Sensor is used in this project.
In Reflective Type IR Sensor, the IR transmitter and receiver are placed side by side. When there is no obstacle in front of the sensor, the IR rays transmitted by the IR Transmitter will travel undetected as there are no rays falling on the IR Receiver.
If there is an obstacle in front of the IR Transmitter and Receiver pair, the IR Rays gets reflected off from the surface of the obstacle and are incident on the IR Receiver.
This setup can be configured to detect an object like a Train and in turn can be used to switch ON or OFF the loads like motors with the help of microcontroller.
Circuit Diagram

Project Components
Microcontroller Section
- AT89C52 MCU
- 11.0592 MHz Quartz Crystal
- 2 x 22pF Ceramic Capacitor
- 10uF / 16V Electrolytic Capacitor
- 10K Resistors-2
- AT89C52 Programmer Board
Sensor and Load Section
- 2 x Reflective Type IR Sensor
- 2 x 1K Resistor
- L293D Motor Driver IC
- Motor
Component Description
IR Sensor
- An IR sensor is used in this project to sense the arrival and departure of the train.
- An IR Sensor generally comprises of two components: an IR Transmitter and an IR Receiver. An IR Transmitter is a device that emits IR Rays.
- Similarly, an IR Receiver is a device that detects the IR Rays. Photo Diodes are the most commonly used IR Receivers.
L293D Motor Driver
L293D is a motor driver IC used in this project to control the gate motor. L293D Motor Drive IC is a dual H-bridge type motor driver and is available in 16-pin Dual in-line Package.
With the help of this motor driver IC, we can control two motors at a time with both forward and reverse direction control for individual motors.
Motor drivers are generally used to drive high current drawing devices like DC Motors, stepper motors, high intensity lights, etc. They act as simple current amplifiers as their input is a low current signal usually from a microcontroller and their output is a high current signal to drive the loads.
Circuit Design
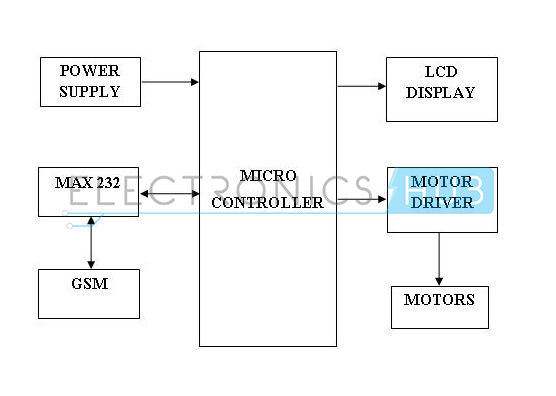
Major components of our project are 8051 microcontroller (AT89C52), Reflective Type IR Sensor, L293D Motor Driver IC and a Motor.
The mandatory connections for 8051 MCU include oscillator circuit, reset switch and EA Pin.
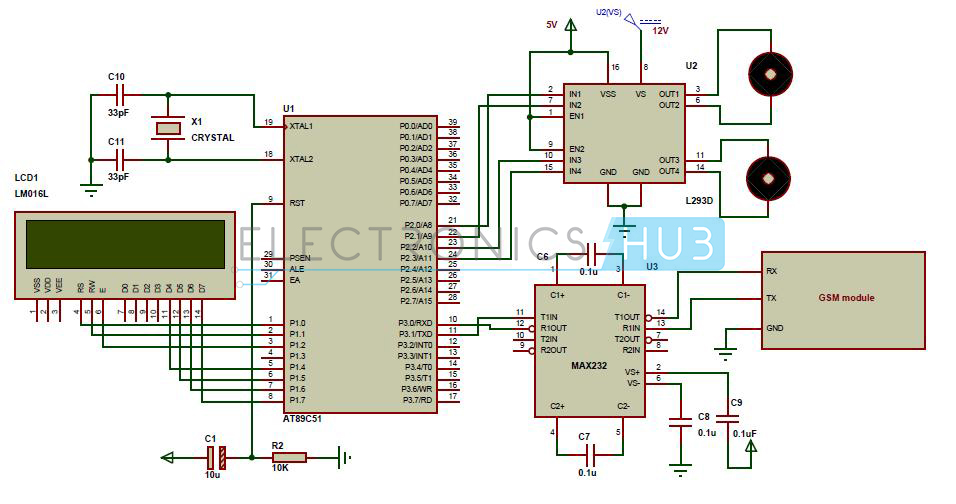
A crystal oscillator of up to 20MHz can be used as a source of external clock. In this project, an 11.0592 MHz quartz crystal oscillator is used. To complete the external oscillator circuit, two 22pF capacitors are used. Finally, the EA pin is pulled high using a resistor.
Now, let us see the actual connections required to implement the project. In that, first is the L293D Motor drive. The inputs (IN1 and IN2) to the motor driver (Pins 1 and 2) are given from Port 0 of the microcontroller.
But before connecting them, two 1K resistors are used to pull the Port 0 pins high. Now, connect the motor driver input pins i.e. IN1 and IN2 to first two pins of Port 0 i.e. P0.0 and P0.1.
A motor is connected to OUT pins of the motor driver.
Finally connect two IR sensors to the microcontroller: one for detecting the arrival of the train and one for detecting the departure of the train.
So, connect the data outputs of the IR sensors to the pins P3.6 and P3.7 of the microcontroller.
Working
The working of the project is very simple and is explained here.
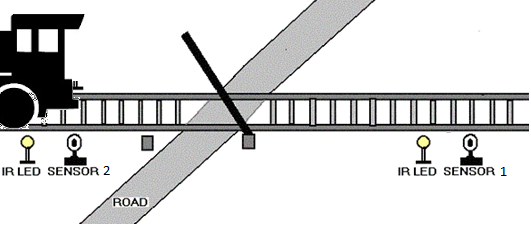
- Practically, the two IR sensors are placed at left and right side of the railway gate. The distance between the two IR sensors is dependent on the length of the train. In general we have to consider the longest train in that route.
- Now we’ll see how this circuit actually works in real time. In this image, we can see the real time representation of this project.

- If the sensor 1 detects the arrival of the train, microcontroller starts the motor with the help of motor driver in order to close the gate.

- The gate remains closed as the train passes the crossing.
- When the train crosses the gate and reaches second sensor, it detects the train and the microcontroller will open the gate.
Advantages and Applications
- An Automatic Railway Gate Control is implemented with very simple hardware and easy control.
- Human intervention at level crossings can be removed with the help of this project and many railway level crossing accidents can be prevented.
Limitations
- The system can be implemented more efficiently by incorporating more efficient sensor network.
- A combination manual wireless control and sensors based control can be used for better operation.